명령어
스마트 확장보드를 사용하기 위해서는 SPC 라이브러리의 spc_request_dev함수 또는 spc_request_sys함수를 사용합니다.
spc_request_dev($sid, $cmd)
spc_request_sys($sid, $cmd)
- $sid: 슬레이브 아이디
- $cmd: 명령어 문자열
스마트 확장보드 공통 명령어
모든 스마트 확장보드가 공통으로 지원하는 명령어는 spc_request_sys함수를 사용합니다.
다음은 스마트 확장보드 공통 명령어 목록입니다.
| 명령어 | 옵션 | 설명 |
|---|---|---|
| get | did | 디바이스 아이디 확인 |
| get | uid | 유니크 아이디 확인 |
PES-2402 명령어
스마트 확장보드별로 적용되는 명령어는 spc_request_dev함수를 사용합니다.
다음은 PES-2402가 지원하는 명령어 목록입니다.
| 명령어 | 옵션 | 설명 |
|---|---|---|
| set | $port delay $time | 선택한 포트의 입력신호 유지시간(단위 : 밀리 초) |
| get | $port input | 선택한 포트의 상태를 확인 |
- $time : 지연시간(1 ~ 30,000, 단위 : 밀리 초)
- $port : 제어할 포트 번호(0 ~ 3)
"set ~ delay" 명령어
PES-2402는 이 명령으로 설정된 지연시간보다 짧게 유지되는 신호들을 무시합니다. 단위는 밀리 초이며 설정 값의 범위는 1 ~ 30,000 입니다. 만약 지연시간을 0으로 설정하면 최소 값인 1 밀리 초로 자동 설정됩니다. 특정 포트에 대한 지연시간 설정은 해당 포트에 대해 다시 지연시간 설정을 할 때까지 적용됩니다.
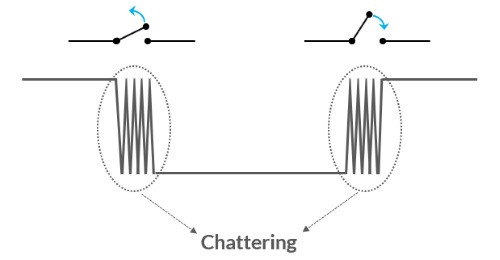
이 명령은 채터링(chattering) 현상에 의한 영향을 없애기 위해 사용됩니다. 채터링 현상이란 수동으로 스위치를 켜거나 끌 때 접촉의 진동에 의해 아주 짧은 시간의 on/off신호가 반복되는 것을 말합니다. 이 현상은 특정 시스템에서 오동작을 일으킬 수 있습니다.